ESP32-C6-DevKitC-1
ESP32-C6-DevKitC-1 is an entry-level development board based on ESP32-C6-WROOM-1(U), a general-purpose module with a 8 MB SPI flash. This board integrates complete Wi-Fi, Bluetooth LE, Zigbee, and Thread functions. You can find the board schematic here.
Most of the I/O pins are broken out to the pin headers on both sides for easy interfacing. Developers can either connect peripherals with jumper wires or mount ESP32-C6-DevKitC-1 on a breadboard.
ESP32-C6-DevKitC-1 Board Layout
The block diagram below presents main components of the ESP32-C6-DevKitC-1.
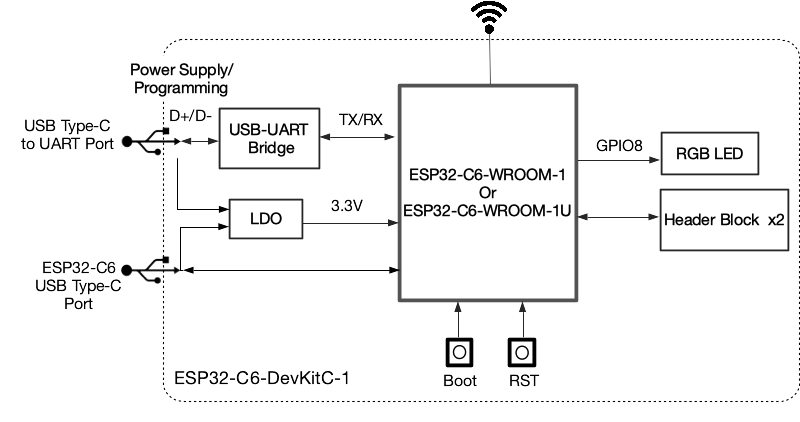
ESP32-C6-DevKitC-1 Electrical Block Diagram
Hardware Components
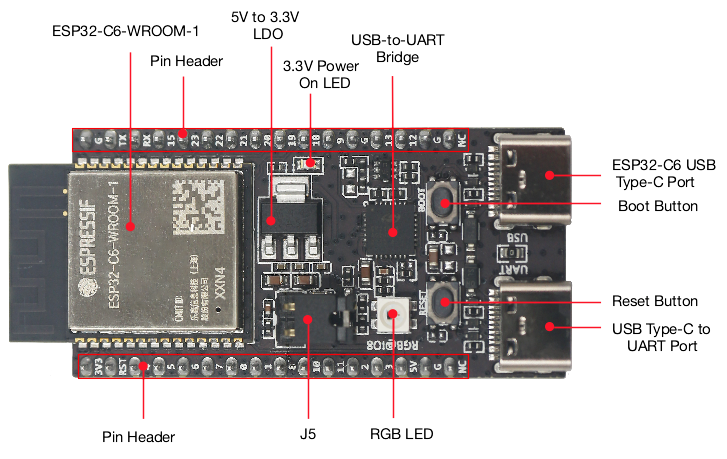
ESP32-C6-DevKitC-1 Hardware Components
Board LEDs
There is one on-board LED that indicates the presence of power. Another WS2812 LED is connected to GPIO8 and is available for software.
Current Measurement
The J5 headers on the ESP32-C6-DevKitC-1 can be used for measuring the current drawn by the ESP32-C6-WROOM-1(U) module:
Remove the jumper: Power supply between the module and peripherals on the board is cut off. To measure the module’s current, connect the board with an ammeter via J5 headers;
Apply the jumper (factory default): Restore the board’s normal functionality.
Note
When using 3V3 and GND pin headers to power the board, please remove the J5 jumper, and connect an ammeter in series to the external circuit to measure the module’s current.
Pin Mapping
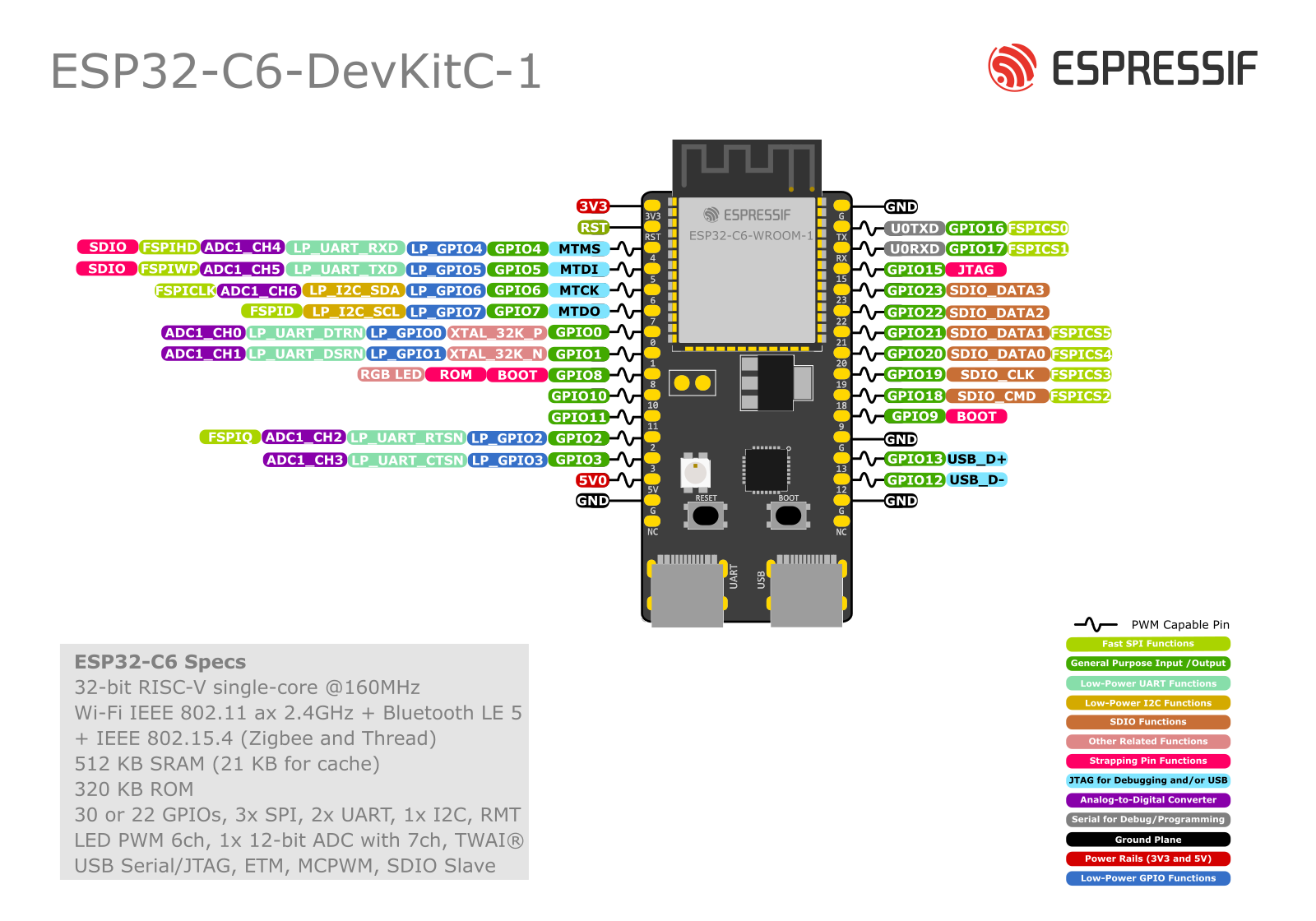
ESP32-C6-DevKitC-1 Pin Layout
Configurations
All of the configurations presented below can be tested by running the following commands:
$ ./tools/configure.sh esp32c6-devkitc:<config_name>
$ make flash ESPTOOL_PORT=/dev/ttyUSB0 -j
Where <config_name> is the name of board configuration you want to use, i.e.: nsh, buttons, wifi…
Then use a serial console terminal like picocom configured to 115200 8N1.
bmp180
This configuration enables the use of the BMP180 pressure sensor over I2C.
You can check that the sensor is working by using the bmp180 application:
nsh> bmp180
Pressure value = 91531
Pressure value = 91526
Pressure value = 91525
capture
The capture configuration enables the capture driver and the capture example, allowing the user to measure duty cycle and frequency of a signal. Default pin is GPIO 18 with an internal pull-up resistor enabled. When connecting a 50 Hz pulse with 50% duty cycle, the following output is expected:
nsh> cap
cap_main: Hardware initialized. Opening the capture device: /dev/capture0
cap_main: Number of samples: 0
pwm duty cycle: 50 %
pwm frequence: 50 Hz
pwm duty cycle: 50 %
pwm frequence: 50 Hz
coremark
This configuration sets the CoreMark benchmark up for running on the maximum number of cores for this system. It also enables some optimization flags and disables the NuttShell to get the best possible score.
Note
As the NSH is disabled, the application will start as soon as the system is turned on.
gpio
This is a test for the GPIO driver. It uses GPIO1 and GPIO2 as outputs and GPIO9 as an interrupt pin.
At the nsh, we can turn the outputs on and off with the following:
nsh> gpio -o 1 /dev/gpio0
nsh> gpio -o 1 /dev/gpio1
nsh> gpio -o 0 /dev/gpio0
nsh> gpio -o 0 /dev/gpio1
We can use the interrupt pin to send a signal when the interrupt fires:
nsh> gpio -w 14 /dev/gpio2
The pin is configured as a rising edge interrupt, so after issuing the above command, connect it to 3.3V.
i2c
This configuration can be used to scan and manipulate I2C devices. You can scan for all I2C devices using the following command:
nsh> i2c dev 0x00 0x7f
motor
The motor configuration enables the MCPWM peripheral with support to brushed DC motor control.
It creates a /dev/motor0 device with speed and direction control capabilities
by using two GPIOs (GPIO21 and GPIO22) for PWM output. PWM frequency is configurable
from 25 Hz to 3 kHz, however it defaults to 1 kHz.
There is also support for an optional fault GPIO (defaults to GPIO9), which can be used
for quick motor braking. All GPIOs are configurable in menuconfig.
mcuboot_nsh
This configuration is the same as the nsh configuration, but it generates the application
image in a format that can be used by MCUboot. It also makes the make bootloader command to
build the MCUboot bootloader image using the Espressif HAL.
nsh
Basic configuration to run the NuttShell (nsh).
ostest
This is the NuttX test at apps/testing/ostest that is run against all new
architecture ports to assure a correct implementation of the OS.
pwm
This configuration demonstrates the use of PWM through a LED connected to GPIO8.
To test it, just execute the pwm application:
nsh> pwm
pwm_main: starting output with frequency: 10000 duty: 00008000
pwm_main: stopping output
qencoder —
This configuration demostrates the use of Quadrature Encoder connected to pins
GPIO10 and GPIO11. You can start measurement of pulses using the following
command (by default, it will open \dev\qe0 device and print 20 samples
using 1 second delay):
nsh> qe
rmt
This configuration configures the transmitter and the receiver of the
Remote Control Transceiver (RMT) peripheral on the ESP32-C6 using GPIOs 8
and 2, respectively. The RMT peripheral is better explained
here,
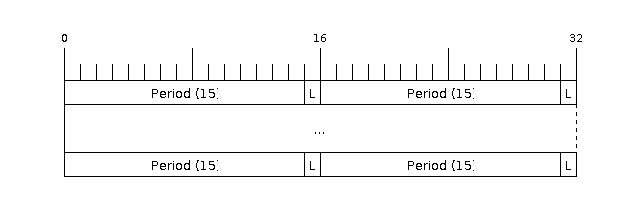
in the ESP-IDF documentation. The minimal data unit in the frame is called the
RMT symbol, which is represented by rmt_item32_t in the driver:
The example rmtchar can be used to test the RMT peripheral. Connecting
these pins externally to each other will make the transmitter send RMT items
and demonstrates the usage of the RMT peripheral:
nsh> rmtchar
WS2812 addressable RGB LEDs
This same configuration enables the usage of the RMT peripheral and the example
ws2812 to drive addressable RGB LEDs:
nsh> ws2812
Please note that this board contains an on-board WS2812 LED connected to GPIO8 and, by default, this config configures the RMT transmitter in the same pin.
rtc
This configuration demonstrates the use of the RTC driver through alarms. You can set an alarm, check its progress and receive a notification after it expires:
nsh> alarm 10
alarm_daemon started
alarm_daemon: Running
Opening /dev/rtc0
Alarm 0 set in 10 seconds
nsh> alarm -r
Opening /dev/rtc0
Alarm 0 is active with 10 seconds to expiration
nsh> alarm_daemon: alarm 0 received
spi
This configuration enables the support for the SPI driver.
You can test it by connecting MOSI and MISO pins which are GPIO7 and GPIO2
by default to each other and running the spi example:
nsh> spi exch -b 2 "AB"
Sending: AB
Received: AB
spiflash
This config tests the external SPI that comes with the ESP32-C6 module connected through SPI1.
By default a SmartFS file system is selected. Once booted you can use the following commands to mount the file system:
nsh> mksmartfs /dev/smart0
nsh> mount -t smartfs /dev/smart0 /mnt
sta_softap
With this configuration you can run these commands to be able to connect your smartphone or laptop to your board:
nsh> ifup wlan1
nsh> dhcpd_start wlan1
nsh> wapi psk wlan1 mypasswd 3
nsh> wapi essid wlan1 nuttxap 1
In this case, you are creating the access point nuttxapp in your board and to
connect to it on your smartphone you will be required to type the password mypasswd
using WPA2.
Tip
Please refer to ESP32 Wi-Fi SoftAP Mode for more information.
The dhcpd_start is necessary to let your board to associate an IP to your smartphone.
timer
This config test the general use purpose timers. It includes the 4 timers, adds driver support, registers the timers as devices and includes the timer example.
To test it, just run the following:
nsh> timer -d /dev/timerx
Where x in the timer instance.
twai
This configuration enables the support for the TWAI (Two-Wire Automotive Interface) driver.
You can test it by connecting TWAI RX and TWAI TX pins which are GPIO0 and GPIO2 by default
to an external transceiver or connecting TWAI RX to TWAI TX pin by enabling
the CONFIG_CAN_LOOPBACK option (Device Drivers -> CAN Driver Support -> CAN loopback mode)
and running the can example:
nsh> can
nmsgs: 0
min ID: 1 max ID: 2047
Bit timing:
Baud: 1000000
TSEG1: 15
TSEG2: 4
SJW: 3
ID: 1 DLC: 1
usbconsole
This configuration tests the built-in USB-to-serial converter found in ESP32-C6.
esptool can be used to check the version of the chip and if this feature is
supported. Running esptool.py -p <port> chip_id should have Chip is
ESP32-C6 in its output.
When connecting the board a new device should appear, a /dev/ttyACMX on Linux
or a /dev/cu.usbmodemXXX om macOS.
This can be used to flash and monitor the device with the usual commands:
make download ESPTOOL_PORT=/dev/ttyACM0
minicom -D /dev/ttyACM0
watchdog
This configuration tests the watchdog timers. It includes the 1 MWDTS, adds driver support, registers the WDTs as devices and includes the watchdog example application.
To test it, just run the following command:
nsh> wdog -i /dev/watchdogX
Where X is the watchdog instance.
wifi
Enables Wi-Fi support. You can define your credentials this way:
$ make menuconfig
-> Application Configuration
-> Network Utilities
-> Network initialization (NETUTILS_NETINIT [=y])
-> WAPI Configuration
Or if you don’t want to keep it saved in the firmware you can do it at runtime:
nsh> wapi psk wlan0 mypasswd 3
nsh> wapi essid wlan0 myssid 1
nsh> renew wlan0
Tip
Please refer to ESP32 Wi-Fi Station Mode for more information.